Starting to build a new F450
I had a DJI F450 that I bought from a friennd and flew with it for six months but finally I decided that I needed something bigger so I sold the DJI F450 and stared building a Tarot T810.
Now I'm almost ready with the T810 and have done a couple of test flights but it is to big and expensive to test new finctions on so I will build another F450. The plan is to have a cheap testing platform for new Arducopter functions and beta versions and if it fails it won't be as expensive as if the T810 crashed.
Part list so far
I wanted to have a 450 sized multicopter so I ordered a clone of DJI F450 from Ebay, didnt want to have the regular red/white fram so I bought a black one.


I really like the T-motors I have om my T810 so after some searching I found four used T-Motor MT2814-10 KV770 motors.

The propellers I plan for are Foxtech carbon fibre 11x5.5 propellers

And the flight controller will of course be a Pixhawk since I want to tests new Arducopter beta firmwares and functions, or it wont't really be a pixhawk but a Pixhawk clone, I will test beta versions and I will crash so I dont want to break a real Pixhawk since it's more expensive than the clone.

I will use a 4S battery and 30A SimonK ESCs but I haven't ordered them yet.
Parts are arriving now
ordered some parts from Ready To Fly Quads a couple of days ago and got them today

Have decided to go for RTF ESC-EZ 30amp ESCs that are flashed with SimonK firmware but I will reflash them with BLHeli instead. Soldered the first today and will do the rest during the weekend.

Pixhawk has arrived
The Pixhawk arrived today, it looked very similar to the original 3dr Pixhawk.

The solders looked very nice, uploaded new firmware and did some initial calibration.

Soldered power and motor cabled to the ESCs, will have bullet connectors between ESCs and motors.


The assembly has started
Had some time today to start with the assembly, soldered the signal cables to the ESCs snd soldered everything on the bottom plate

The arms and motors are in place

Have added LEDs on the rear so it will be easier to see which way the quad is heading.

The F450 is assembled
Really early day today, the first Formula 1 race started at 06:00 CET so I got up really early and had time for more assembly after the race. The motors are connected now so ther turn the correct way and I could put schrink tube over the bullet connectors, Pixhawk is in place and I hope the receiver and propeller moints for CF propellers arrive tthis week.

Balanced all propellers, didn't need much weight to balance them perfectly.


Almost ready for a test flight
The Frsky X8R receivere arrived today so I could continue with the build, the ESCs are now calibrated, I have configured flight modes, fail safe, EKF, tested the motor connections calibrated compasses and accelerometer so it is basically ready for a first flight... I really hope the propeller mounts arrive tomorrow.

Finally a maiden flight
Got home late yesterday and the propeller mounts were waiting for me :-) So with the propellers on I could finally do a maiden flight with the F450, It performed much better than I had anticipated.
It was a little windy and the battery wasn't fully loaded so it aborted the auto tune and went into battery fail safe mode, since there have been a lot of solar storms the last couple of days I didn't want to test RTH so I landed manually.
Problem with motors spinning after disarm
Got a problem after my second test flight, one motor continued to spin after I had landed and even after disarm, had to disconnect the battery to stop it. tried to recalibrate the ESCs but that didn't help but after Googling this I found other with the same problem, the recommended solution from 3DR was to flash the EEPROM and reinstall firmware. Tried it and it solved the problem.
The legs have arrived they should do until I have bought or made a pair of retractable legs.

APM:Copter 3.3-rc1 released
A first official beta of Arducopter or as it is called now APM:Copter 3.3-rc1 was released yesterday, there are some new features, one of them is new AutoTune on all three axes, uploaded the new version to my Pixhawk, calibrated accelermometer and tested to do an AutoTune. My F450 has been flying with default values before.
The Quad is more rapid than with the default values but it doesn't really stabilise as quickly as before. It was a little bit windy today, I will do another AutoTune when there is no wind. I also hope the retractable legs I have bought will arrive soon so I can test the Landing Gear Feature added in 3.3
Reply from APM:Copter Developers
Got a reply from the developers of APM:Copter. "The release went out with AUTOTUNE_AGGR set to 0.05. This tends to be a little sensitive, the default should be 0.1."
So I'll just wait for RC2 and do a new AutoTune
Retractable legs
Bought a pair of retractable legs for the F450 on Ebay so I can test the retractable leg control in APM:Copter 3.3 and I needed a pair of taller legs then the ones I had so I could fit a gimbal under the Quad.

The legs are supposed to be mounted in the holes for the side arms on a F550 but to fit them on a F450 I will need to do some kind of custom mount, currently I have mounted them in the holes for my fromt right and real left arm just to test them. I have currently connected them directly to my receiver and tyer retract as they should but the legs are way to weak, the rod between the servo and the leg is made of Aluminum and bends to easy, Will try to replace it with a steel rod.

APM:Copter 3.3-rc3
The RC1 version had some problems with autotune so I decided to do a new autotune as soon as a new beta version was released, RC2 and RC3 was released together this weekend as RC3, was a little bit windy today but >I decided to do an autotune anyway. Every time I enable autotune the quad descends quite low and if I raise the throttle is acends a little bit but really slowly. The first attempt went without problems but since it was windy I had to reposition the quad a lot and it didn't end the autotune before I run out of batteries. Next attempt on my 2nd battery it started as before by descending then when I had to reposition the quad it went wrong...
2nd autotune and crash
Did a second autotune attempt today but it resulted in a crash...
I think the problem was that one of the propellers loosened midair since I saw that iw was a couple of meters away from the quad when it crashed.

Fortunately there wasn't to much damage, I ordered a spare frame a couple of days ago so it should arrive this week and I have a couple of spare propellers, hopefully it will be ready to fly later this week.
The F450 is flying again
I received the spare arms this week and started to replace the broken parts, was going to test it two days ago but when I looked at the GPS cable closely I saw a slach in the insulation, removed the insulation and saw that three of six cables were broken.
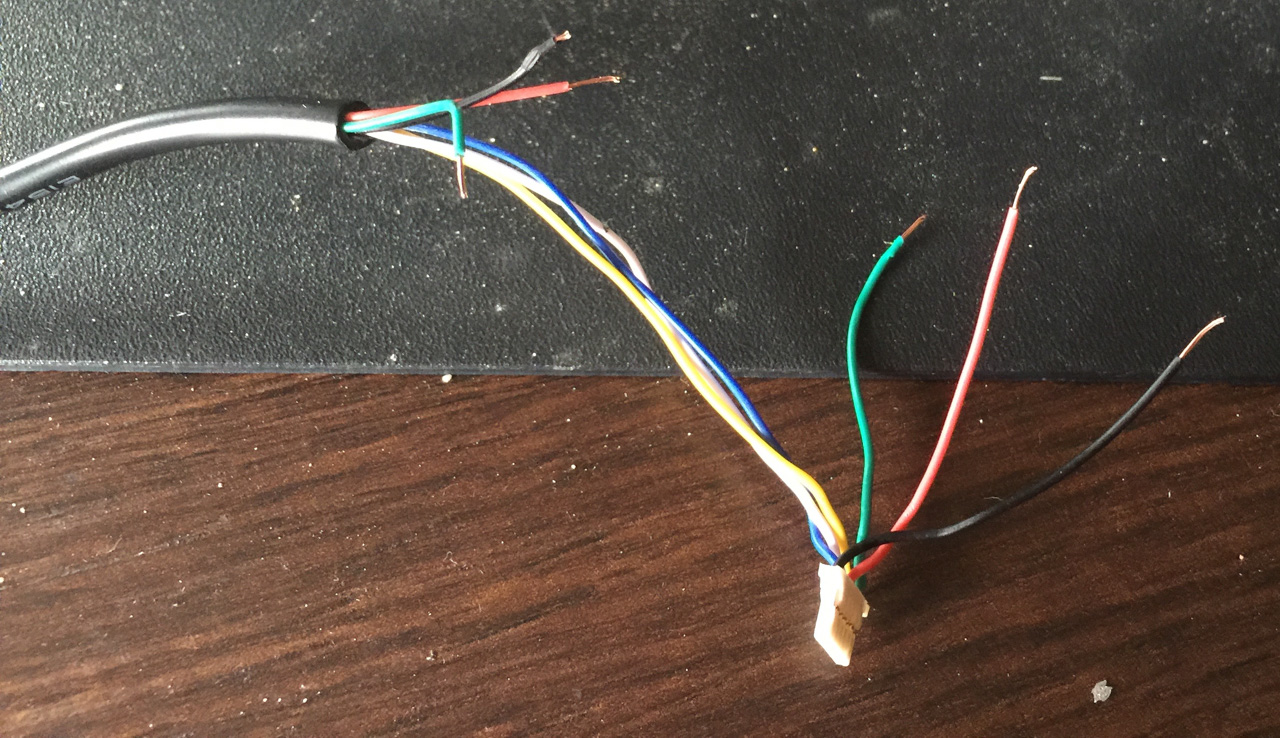
Soldered the broken cables and tested that the GPS worked

Some shrink tubing over the soldering

Then one more shrink tube to cover tha cables

Almost as new :-)

Made a test flight today, the quad flies nice again, was hoping to be able to try Auto Tune once more but it was to windy today. Tested the Lost Copter Alarm function that has been added to APM:Copter 3.3-rc3